โทรสอบถามข้อมูลเพิ่มเติม 
กรอกข้อมูลเพื่อให้เจ้าหน้าที่ติดต่อกลับ CLICK
ความเร็วรอบ หมายถึง ความเร็วที่ชิ้นงานหรือมีดตัดหมุนรอบต่อหนึ่งหน่วยเวลา มีหน่วยวัดเป็นรอบต่อนาที "RPM" ย่อมาจาก Revolutions per Minute ซึ่งในการวัดความเร็วรอบ (RPM) นั้น จะมีเซ็นเซอร์ (Sensor) ในการตรวจจับและเครื่องแสดงผลของความเร็วรอบ (RPM) เรียกว่า Tachometer โดยมีหลักการวัดความเร็ว (Speed) ในการเคลื่อนที่ของวัตถุ ส่วนใหญ่จะนำมาประยุกต์ในการวัดความเร็วรอบของเครื่องจักร เช่น เพลาล้อรถยนต์, ความเร็วรอบของใบพัด, รอบของลูกกลิ้ง, ความเร็วรอบของมอเตอร์ เป็นต้น โดยในที่นี้เราจะมาพูดถึงวิธีการวัดค่าความเร็วรอบ (RPM) ของมอเตอร์ ดังนี้
วิธีการวัดค่าความเร็วรอบ (RPM) ของมอเตอร์ หลายท่านคงเจอปัญหาในการวัดความเร็วรอบ (RPM) ของมอเตอร์ ไม่ว่าจะเป็นการเลือกอุปกรณ์ (มิเตอร์หรือหน้าจอแสดงผล) โดยค่าที่วัดได้ไม่เที่ยงตรง เปลี่ยนชนิดของเซ็นเซอร์ (Sensor) แล้วก็ยังไม่สามารถแก้ปัญหาได้ แล้วเราจะทราบได้อย่างไรว่าอุปกรณ์ที่ใช้งานอยู่ในปัจจุบันมีความแม่นยำเพียงพอหรือไม่ เพื่อให้การผลิตมีประสิทธิภาพสูงสุด
วันนี้เรามาดูหลักการง่าย ๆ ในการวัดความเร็วรอบ (RPM) ของมอเตอร์กัน โดยยกตัวอย่างเซ็นเซอร์ (Sensor) ประเภท Proximity Switch ในการวัดหรือการตรวจจับความเร็วรอบมอเตอร์ด้วยวิธีนี้ มีความแม่นยำมากน้อยแค่ไหน
ก่อนอื่นเรามาทำความรู้จัก Proximity Sensor โดยแบ่งออกเป็น 2 ประเภท คือ
1. Inductive Sensor เป็นเซ็นเซอร์ที่ทำงานโดยอาศัยหลักการเปลี่ยนแปลงค่าความเหนี่ยวนำของขดลวด ซึ่งการเปลี่ยนแปลงดังกล่าวจะมีผลต่อชิ้นงานหรือวัตถุที่เป็นโลหะเท่านั้น หรือเรียกกันทางภาษาเทคนิคว่า Inductive Sensor ข้อดีของเซ็นเซอร์ชนิดนี้ คือ ทนทาน โดยสามารถทำงานได้ในช่วงอุณหภูมิที่กว้าง (Wide Temperature Ranges) และทำงานในสภาวะที่มีการรบกวนทางแสง (Optical) และเสียง (Acoustic) ซึ่งเทียบเท่ากับชนิดเก็บประจุ (ดังรูป)

ตัวอย่าง Proximity Sensor ชนิดตรวจจับโลหะ (Inductive Sensor)
2. Capacitive Sensor เซ็นเซอร์ประเภทนี้มีโครงสร้างทั้งภายนอกและภายในคล้ายกับแบบเหนี่ยวนำ การเปลี่ยนแปลงของความจุ ซึ่งเนื่องมาจากการเคลื่อนที่ของวัตถุชนิดหนึ่งเข้ามาใกล้สนามไฟฟ้าของคาปาซิเตอร์ (Capacitor) เซ็นเซอร์ชนิดนี้สามารถตรวจจับอุปกรณ์ที่ไม่ได้เป็นโลหะและอโลหะได้ เช่น พลาสติก, โฟม, น้ำ เป็นต้น
ตัวอย่าง Proximity Sensor ชนิดตรวจจับอโลหะ (Capacitive Sensor)
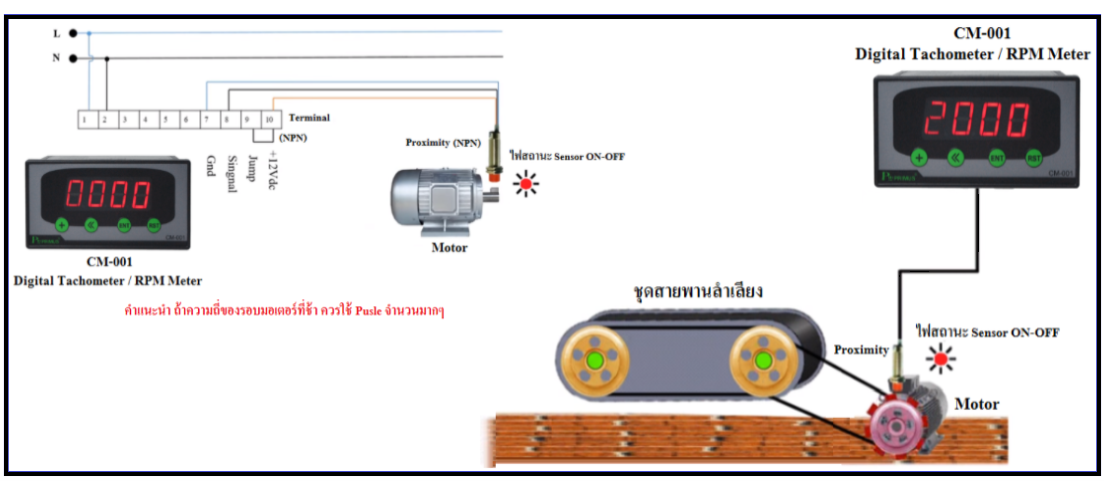
ตัวอย่าง : การใช้ Tachometer รุ่น CM-001 ที่รับสัญญาณพัลส์ (Pulse) จากพร็อกซิมิตี้เซ็นเซอร์ชนิดตรววจับโลหะ (Inductive Proximity Switch) ในการวัดค่าความเร็วรอบต่อนาที (RPM) ของมอเตอร์สายพานลำเลียง
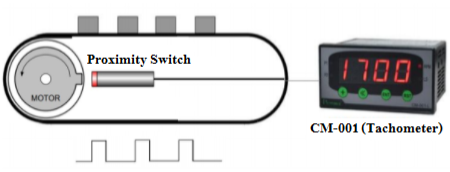
รูปแสดงตัวอย่างการใช้ Tachometer รุ่น CM-001 ร่วมกับ Inductive Proximity Switch
ในการวัดค่าความเร็วรอบต่อนาที (RPM) ของมอเตอร์สายพานลำเลียง
โดย Inductive Proximity Switch ปกติเราจะใช้ตรวจจับวัตถุโลหะในเครื่องจักรเพื่อบอกตำแหน่ง ส่งสัญญาณให้ PLC เพื่อทำการควบคุมเครื่องจักร นิยมใช้กันมากเนื่องจากใช้หลักการสนามแม่เหล็ก หมดปัญหาเรื่องน้ำ, ฝุ่น และสามารถนำ Inductive Proximity Switch มาใช้ในการวัดความเร็วก็ได้ เช่น การตรวจจับที่เพลาหรือแกนที่เชื่อมต่อกับมอเตอร์โดยการฝังหมุดโลหะ เช่น 1 จุด หรือ 4 จุด โดยต้องออกแบบให้สมมาตรกัน จึงจะวัดความเร็วได้ถูกต้อง
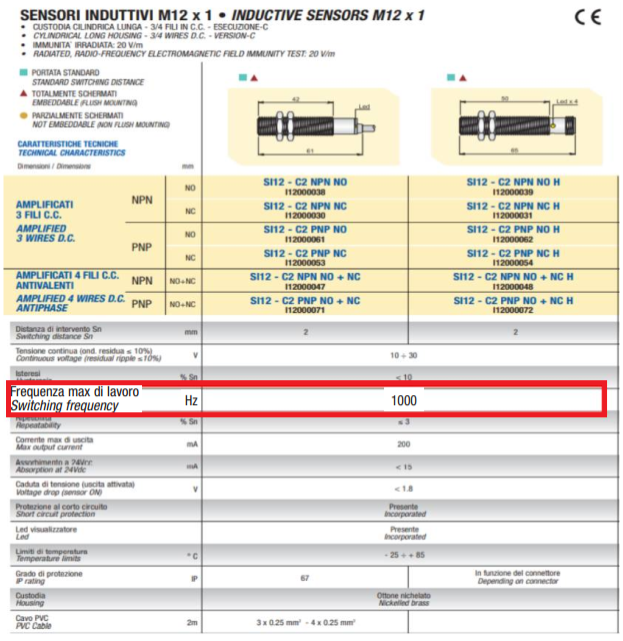
ในการเลือกใช้งาน Inductive Proximity Switch สิ่งที่สำคัญคือ การตอบสนองความถี่ ซึ่งมีหน่วยเป็น Hz (ครั้งต่อวินาที) โดยการพิจารณาจากความเร็วสูงสุดของเครื่อง
ตัวอย่าง : Name plate motor ระบุไว้ที่ 1,400 RPM โดยมีสูตรการแปลงหน่วย RPM เป็น Hz ดังนี้

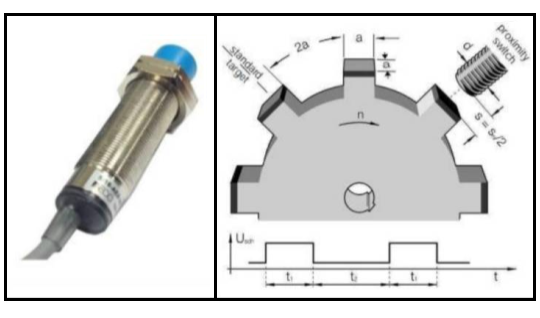
ยกตัวอย่างการใช้งาน Inductive Proximity Switch ในงานตรวจจับความเร็วรอบของเฟืองที่มีฟันเฟือง 12 ฟันเฟือง และความเร็วรอบ 3000 รอบต่อนาที (RPM) สิ่งที่ต้องคำนึง คือ
1. ประเภทของชิ้นงาน เนื่องจากเฟืองเป็นโลหะ จึงต้องใช้เซ็นเซอร์ประเภท Inductive Proximity Switch เหมาะสำหรับตรวจจับชิ้นงานหรือตำแหน่งวัตถุที่เป็นโลหะเท่านั้น
2. ระยะทางในการตรวจจับ วัตถุที่ตรวจจับเป็นเหล็ก สามารถหาระยะทางในการตรวจจับตามค่า 1.00 x อัตราระยะตรวจจับ
3. ความถี่ในการตรวจจับหรือ Inductive Proximity Switch
สามารถคำนวณได้ตามสมการดังนี้
RPM = f x 60 x (1/N)
โดยที่ RPM = หน่วยความเร็วรอบต่อนาที
f = ความถี่
N = จำนวนพัลล์ต่อรอบ
จากความต้องการในการวัดความเร็วนั้นอยู่ที่ 3000 RPM และฟันเฟืองมีทั้งหมด 12 ฟันเฟือง หรือ 12 พัลล์ต่อรอบ
ดังนั้น f = (3000 x 12) / (60)
f = 600 Hz
จากการคำนวณจะเห็นได้ว่าค่าความถี่ที่ต้องใช้อย่างน้อย 600 Hz หากต้องเลือกใช้งานจริงแนะนำให้เผื่อเพิ่มขึ้น ซึ่งในครั้งนี้เราจะเลือก Inductive Proximity Sensor ที่มีความถี่ 800 Hz
4. ขนาดของ Inductive Proximity Sensor (Housing Size) การเลือกขนาดของเซ็นเซอร์จะขึ้นอยู่กับพื้นที่ในการติดตั้ง หากเป็นพื้นที่แคบจะใช้เซ็นเซอร์ขนาดเล็ก หากเป็นพื้นที่กว้างจะใช้เซ็นเซอร์ขนาดใหญ่ได้ ครั้งนี้เลือกเซ็นเซอร์ขนาด M8 ที่มีระยะ Sn เท่ากับ 2 mm.
การต่อวงจรการใช้งานของ Tachometer รุ่น CM-001
สาเหตุที่วัดได้ไม่ตรง เกิดจากสาเหตุอะไร?
ปัญหาจากการวัดค่าได้ไม่ตรง มีสาเหตุมาจากหลาย ๆ อย่าง แต่มีประเด็นสำคัญที่น่าสนใจ ส่วนใหญ่มาจาก
1. การเลือกชนิด Sensor ไม่ตรงกับการใช้งาน ความละเอียดไม่เพียงพอ เช่น ในงานที่มีความเร็วรอบต่ำมาก ควรใช้ Incremental Encoder แทน Inductive Proximity Switch หรือ Photoelectric Switch ที่จะทำให้สามารถเลือก Pulse Output ได้ละเอียดมากขึ้น ความแม่นยำจะสูงขึ้น
2. มิเตอร์ไม่สามารถวัดค่าความถี่ต่ำ ๆ มากได้ เช่น การใช้ Inductive Proximity Switch วัดความเร็วจะเกิดปัญหานี้ เมื่อเครื่องจักรเดินด้วยความเร็วรอบต่ำ ๆ
3. ไม่ได้คำนวณความเร็วต่ำสุดของเครื่องจักรเพื่อคำนวณความถี่และหาชนิดของ Sensor ให้เหมาะสม ท้ายสุดจะเห็นได้ว่าการเลือกใช้อุปกรณ์วัดความเร็วในงานอุตสาหกรรมให้มีความเหมาะสมและแม่นยำนั้น ไม่ใช่เรื่องยากอีกต่อไป
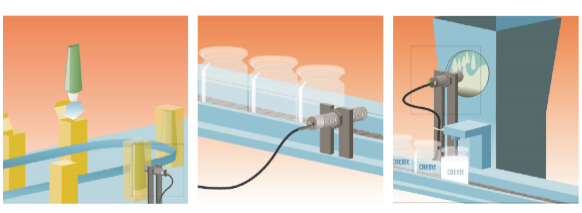
การประยุกต์ใช้งาน Proximity Switch

โทรสอบถามข้อมูลเพิ่มเติม
กรอกข้อมูลเพื่อให้เจ้าหน้าที่ติดต่อกลับ CLICK