โทรสอบถามข้อมูลเพิ่มเติม 
กรอกข้อมูลเพื่อให้เจ้าหน้าที่ติดต่อกลับ CLICK
เอ็นโค้ดเดอร์ (Encoder) เป็นเซ็นเซอร์สำหรับวัดระยะทาง (Distance Sensor), ความเร็ว (Speed), ทิศทางการหมุนของมอเตอร์ (Direction of Rotation), ตำแหน่งหรือมุม เป็นต้น ที่ใช้ในงานอุตสาหกรรม ซึ่งสามารถแบ่งได้ 2 ประเภท ตามลักษณะของสัญญาณเอาต์พุต (Output Signal) ได้ดังนี้
1. Encoder แบบ Increment หรือที่เรียกว่า Increment Encoder / Rotary Encoder
2. Encoder แบบ Absolute หรือที่เรียกว่า Absolute Encoder
ซึ่ง Encoder ทั้ง 2 แบบนี้ มีความแตกต่างกันอย่างไร ในหัวข้อนี้เราจะมาแนะนำกัน
Incremental Encoder หรือ Incremental Rotary Encoder (เอ็นโค้ดเดอร์แบบหมุน) โครงสร้าง (ดังรูป 1.1) จะประกอบด้วย จานหมุน และอุปกรณ์ตรวจจับ โดยจานหมุนจะมีช่องเล็ก ๆ เมื่อเพลาของมอเตอร์หมุนจะทำให้จานหมุนไปตัดลำแสงของเซ็นเซอร์ (Sensor) ทำให้ชุดรับแสงได้รับสัญญาณเป็นช่วงๆ จึงทำให้สัญญาณเอาต์พุตออกมาเป็นสัญญาณพัลล์ต่อรอบ (PPR) (ดังรูป 1.2)
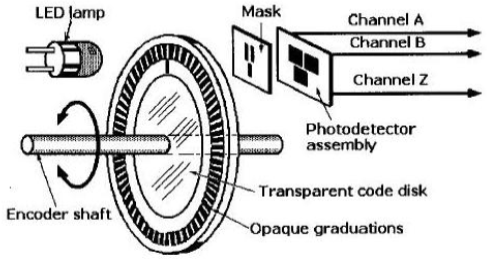
รูป 1.1 แสดงส่วนประกอบของ Incremental Encoder / Rotary Encoder
(credit : http://eng.sut.ac.th/mae/maeweb/sites/default/files/ENCODER.pptx)
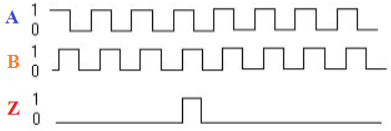
รูป 1.2 ตัวอย่างสัญญาณพัลส์เอาต์พุตของ Incremental Encoder
Incremental Encoder เป็นเอ็นโค้ดเดอร์ (Encoder) ที่ใช้หลักการเมื่อมีการหมุนของแกนเพลา จะทำให้มีสัญญาณเอาต์พุตที่เป็นสัญญาณลูกคลื่นพัลส์สี่เหลี่ยม (Square wave) มี 3 แทรค (Tracks) คือ A , B , Z โดยจะสัมพันธ์กับระยะการเคลื่อนที่และตำแหน่งสัญญาณเอาต์พุตของ Encoder A และ B มีมุมที่ห่างกัน 90 องศา ทางไฟฟ้า ส่วน Z จะมีสัญญาณ 1 พัลส์ ต่อ 1 รอบ หรือบางตัวจะเป็นพัลส์แบบ Invert เช่น A- , B- , Z- ซึ่งเป็นสัญญาณที่กลับเฟสกัน 90 องศา เพื่อเช็คทิศทางการหมุนของมอเตอร์ เป็นต้น
Incremental Encoder แบบนี้จะมีข้อด้อยในกรณีหากมีการถอดสายสัญญาณออกชั่วขณะหรือแหล่งจ่ายไฟฟ้าดับข้อมูลของการเคลื่อนที่ก็จะหายไปหมด ไม่สามารถระบุตำแหน่งพัลส์หรือตำแหน่งองศาได้ ทำให้ต้องมีการปรับที่จุดอ้างอิงใหม่อยู่ตลอดเวลา กรณีนี้อาจจำเป็นต้องใช้เครื่องนับจำนวนแบบตัวเลข (Digital Counter) เชื่อมต่อกับคอมพิวเตอร์เพื่อช่วยบันทึกข้อมูลได้
Absolute Encoder (เอ็นโค้ดเดอร์แบบสัมบูรณ์) โครงสร้าง (ดังรูป 2.1) จะมีหัวอ่านหลายชุดเท่ากับจำนวนบิตเอาต์พุต การเจาะรูบนแผ่นแต่ละชุดก็จะมีระยะห่างเป็นทวีคูณทำให้สามารถทราบตำแหน่งของการหมุน จึงทำให้สัญญาณออกมาในรูปแบบของรหัสโค้ด เช่น Binary, Gray Code เป็นต้น (ดังรูป 2.2)
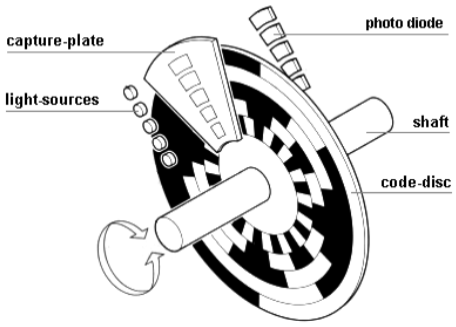
รูป 2.1 แสดงส่วนประกอบของ Absolute Encoder
(credit : http://eng.sut.ac.th/mae/maeweb/sites/default/files/ENCODER.pptx)
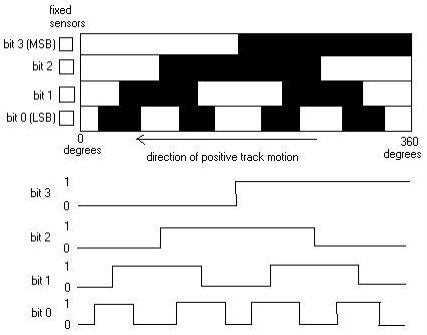
รูป 2.2 ตัวอย่างสัญญาณบิตเอาต์พุตของ Absolute Encoder
(credit : http://www.9engineer.com/index.php?m=article&a=print&article_id=2176)
Absolute Encoder เป็นเอ็นโค้ดเดอร์ (Encoder) ที่ออกแบบมาให้มีรูปแบบสัญญาณเอาต์พุตที่เป็นลักษณะของการเข้ารหัส โดยการใช้รหัสแทนสัญญาณพัลส์ เช่น Binary, Gray Code เป็นต้น เพื่อระบุตำแหน่งการเคลื่อนที่และองศาของแกนเอ็นโค้ดเดอร์ได้มีตำแหน่งที่ถูกต้องและแม่นยำมากที่สุด กรณีแหล่งไฟฟ้าหยุดและทำการจ่ายไฟเข้าไปใหม่ข้อมูลก็ยังอยู่ที่ตำแหน่งเดิม และบ่งบอกได้ว่าตำแหน่งองศาที่อยู่นั้นคือเท่าใด แต่โดยทั่วไป Absolute Encoder จะมีราคาที่แพงกว่าแบบ Incremental Encoder ดังนั้นผู้ใช้งานสามารถเลือกตามความเหมาะสม
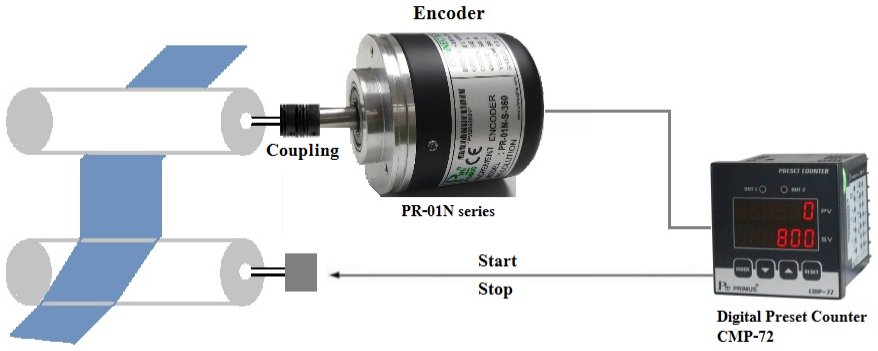
ตัวอย่าง การนำไปใช้งานของ Encoder การวัดระยะหรือความยาวของผ้า, กระดาษ โดยต่อร่วมกับเครื่องนับจำนวน (Digital Counter) เพื่อแสดงค่าระยะทาง และกำหนดการทำงานของ Motor ให้ เริ่ม-หยุด กรณีได้ความยาวหรือระยะทางตามที่ต้องการ ช่วยในการแก้ปัญหาชิ้นงานที่ยาวไม่เท่ากันอีกด้วย
โทรสอบถามข้อมูลเพิ่มเติม
กรอกข้อมูลเพื่อให้เจ้าหน้าที่ติดต่อกลับ CLICK